Atmega328p pin manipulation
A normal Atmega328p microcontroller which is commonly used in robotics has 32 pin and 14 of them are digital pin. Digital pin is the most common pin for microcontroller to communicate and receive signal from the circuit. Atmega328p usually run on 16MHz clock speed or 62.5 ns to complete a clock signal. Theorically, Atmega328p should only need 62.5 ns to flip the power state of a digital pin. However, this simple operation will take 3.40 microsecond (3400 ns) to complete if using digitalWrite() from Arduino library. This is 54.4 times longer than the theorical speed and the root cause is digitalWrite() performs a lot of state checking before doing the real state switching. This can protect the Atmega328p from nasty electronic stuff and beginner programmer. As an “experienced” programmer, we need to develop our own fast pin manipulation code.
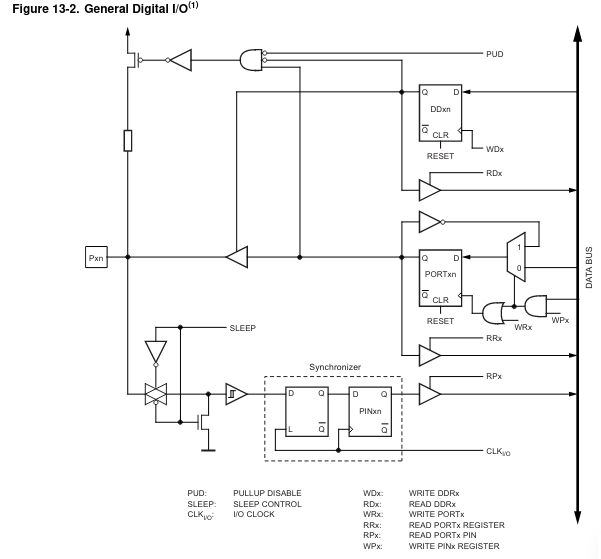
Mechanism behind the pins
Based on the diagram above provided by AVR, each digital pins is consist of three register, DDRX, PORTX, PINX. Fast pin manipulation can be achieve by reading and writing to the registers. Before we start, we need to know their purpose.
DDRX register
DDRX register aka data direction register is register that control the direction of data flow of a digital pin.
If DDRX state is 0, then digital pin will be input mode.
If DDRx state is 1, the digital pin will be output mode.
register description
DDRB – The Port B Data Direction Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | DB7 | DB6 | DB5 | DB4 | DB3 | DB2 | DB1 | DB0 |
| IO | R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
DDRC – The Port C Data Direction Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | - | DC6 | DC5 | DC4 | DC3 | DC2 | DC1 | DC0 |
| IO | R | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
DDRD – The Port D Data Direction Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | DD7 | DD6 | DD5 | DD4 | DD3 | DD2 | DD1 | DD0 |
| IO | R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PORTX register
PORTX register is the register that store data for pin.
In output mode, digital pin will output signal according to PORTX register.
In input mode, digital pin will set pull-up resistor according to PORTX
register description
PORTB – The B Data Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | PB7 | PB6 | PB5 | PB4 | PB3 | PB2 | PB1 | PB0 |
| IO | R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PORTC – The C Data Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | - | PC6 | PC5 | PC4 | PC3 | PC2 | PC1 | PC0 |
| IO | R | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PORTD – The D Data Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | PD7 | PD6 | PD5 | PD4 | PD3 | PD2 | PD1 | PD0 |
| IO | R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PINX register
PINX register will receive and store the signal from pin in input mode.
register description
PINB – The B Pin Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | PB7 | PB6 | PB5 | PB4 | PB3 | PB2 | PB1 | PB0 |
| IO | R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PINC – The C Pin Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | - | PC6 | PC5 | PC4 | PC3 | PC2 | PC1 | PC0 |
| IO | R | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PIND – The D Pin Register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | PD7 | PD6 | PD5 | PD4 | PD3 | PD2 | PD1 | PD0 |
| IO | R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
MCUCR register
MCUCR register as known as MCU control register is a special register for pull-up register control.
register description
MCUCR - The MCU control register
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Name | - | BODS | BODSE | PUD | - | - | IVSEL | IVCE |
| IO | R | R | R | R/W | R | R | R/W | R/W |
| Init | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Pin configuration
Different state of register will also change the behavior of digital pin.
| DDxn | PORTxn | PUD (in MCUCR) | pull-up resister | mode | comment |
|---|---|---|---|---|---|
| 0 | 0 | X | Input | No | Tri-state (Hi-Z) |
| 0 | 1 | 0 | Input | Yes | Pxn will source current if ext. pulled low. |
| 0 | 1 | 1 | Input | No | Tri-state (Hi-Z) |
| 1 | 0 | X | Output | No | Output low (sink) |
| 1 | 1 | X | Output | No | Output high (source) |
Coding part
The theory part is done and lets write some code.
Here’s the code that will turn on pin 6 and turn off pin 9
1 | |